Next: Getting Data In and Up: userhtml Previous: Image Region of Interest
Multi-frequency synthesis can be taken a few steps further with the ATCA. As two IFs can be measured simultaneously, these two IFs can be combined in the imaging stage to further enhance both sensitivity and u-v coverage. As the ATCA can frequency switch rapidly, it is possible to time share between different frequency settings. This involves a trade-off between tangential and radial u-v gaps.
Frequency averaging is generally only applicable for continuum experiments and only if you are not going to be doing multi-frequency synthesis. You might also think twice about averaging if interference was a problem during the observation. You may have to go back and do some more flagging later.
Averaging in time can be performed when observing with short arrays (i.e. when the 6 km antenna is not used). A conservative rule is that you should not average longer than 90/d seconds, where d is the array length in km. If you observe with a short array and are not interested in long baselines for the program source, you probably still want to use antenna 6 when determining the initial calibration. Despite this, d is the array length of interest for the program source, not the calibrators. Nor should you average for longer than the antenna-gain solution interval (unless you have finished calibrating, and are not going to self-calibrate). If you have a strong source, and the phase stability is poor, you should not average in time.
Both averaging in frequency and time are performed by uvaver (see Section 10.4).
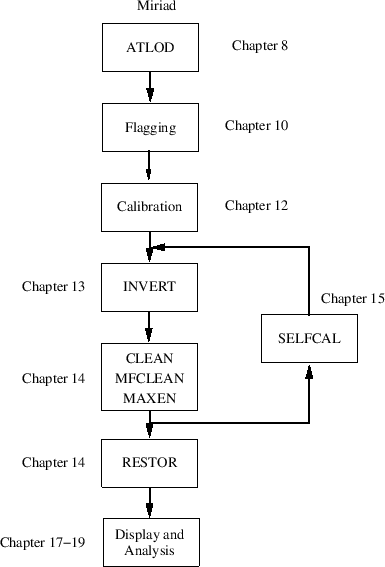
Figure 7.1 gives a flow chart of the normal steps involved in reduction of ATCA data. Note that this is somewhat abbreviated by necessity - additional flow-charts in subsequent chapters give more detail and describe some of the variations.
We will now consider each step in the flow-chart in turn.
The deconvolution tasks are described in Chapter 14.
Miriad manager