Next: The Non-Linear Method - Up: Combining Mosaics and Single Previous: Some Theory and Preparing
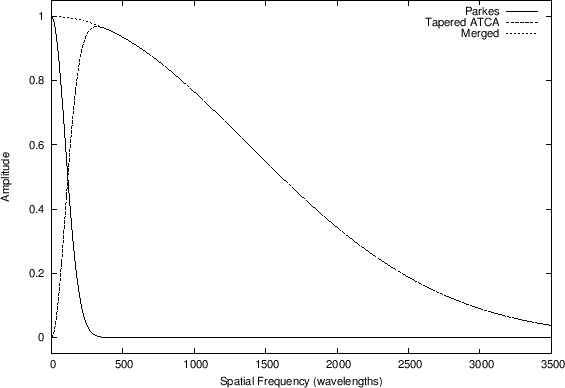
The way that immerge normally combines the data is to give unit weight to the single-dish data at all spatial frequencies, and to taper the low spatial frequencies of the mosaic data. This tapering is such that the sum of single dish and tapered mosaic data produces a gaussian beam equal to the mosaic gaussian beam. Figure 21.1 shows this process for a point source. The Parkes data plus the tapered ATCA data neatly add to give an overall response of a gaussian form.
The inputs to immerge are moderately straightforward: the in parameter gives the name of the input mosaic and single-dish image (in that order), whereas the out parameter gives the name of the output dataset. Because immerge assumes that the beams of both the single-dish and mosaic images are gaussian forms, you will want to use images which approximate this. Whereas single-dish images usually approximate this reasonably, a dirty mosaic does not. Instead, you will want to use a deconvolved/restored mosaic in the immerge process.
Task immerge allows you to set a parameter giving the flux calibration factor, factor: immerge multiplies the single-dish image by this factor before further processing. If you believe your calibration, you should set this parameter to 1 (or whatever number you believe the calibration factor to be). Note that if the parameter is unset, immerge attempts to deduce this factor (i.e. the default is not simply to use a value of 1). It does this by comparing data in the overlap annulus in the spatial frequency coverage of the mosaic and single-dish images. In doing this immerge first convolves the mosaic image to the same resolution as the single dish data (including scaling fiddles to account for the inputs being in Jy/beam in differing resolutions), and it then performs a robust (L1) fit between the two sets of pixel data. If you use immerge to determine the flux calibration factor, you will want to consider setting the following parameters:
uvrange=25,40,metersThe default is to use all spatial frequencies.
The gaussian parameters of the mosaic and single-dish beams are important parameters in the processing that immerge performs. Task immerge tries to determine these by first looking for the relevant gaussian beam parameters within the image datasets. If it cannot find these, it will attempt to estimate the beams, based on its knowledge of the telescope and the observing frequency. These estimates, however, are far from perfect - it is far better to ensure that the beam parameters are within the dataset before using immerge. If you are unsure whether the beam parameters have been set for a dataset, prthd includes these (if found) in amongst the information it prints out. For the mosaic, normally restor will have saved the beam parameters in the dataset. However it is likely that you will need to add the single-dish beam parameters to the single-dish dataset. The items you want to set are bmaj, bmin and possible bpa (beam major, minor axis size and position angle respectively), which are set using puthd.
| PUTHD | |
| in=lmc.sd/bmaj | Set beam major axis. |
| value=18.8,arcmin | Width is 18.8 arcminutes. |
| PUTHD | |
| in=lmc.sd/bmin | Set beam minor axis. |
| value=18.8,arcmin | Width is 18.8 arcminutes. |
When emission continues to the edge of the image (or near the edge), algorithms such as that used by immerge can suffer edge artifacts. If these are problematic, immerge has a some parameters which you might like to try to reduce the problem. Task immerge pads images with a guard band before doing a Fourier transform. Edge effects may be lessened by increasing this from the default value by setting the guard parameter. Task immerge also tries to avoid edge discontinuities by padding the guard band with a mirror image of some of the data. If the image is mostly zero, then zero padding (rather than than a reflection) might be better. In this case use options=zero.
Typical inputs for immerge are
| IMMERGE | |
| in=lmc.mosaic,lmc.sd | Give the mosaic and single-dish inputs |
| out=lmc.combo | Give output combination dataset. |
| factor=1 | Set to the correct flux scales, or |
| factor | leave blank and |
| uvrange=25,40,meters | specify the spatial frequency overlap annulus, |
| region=image(10,20) | and use planes 10 to 20 inclusive, |
| device=/xs | and let it plot the comparison. |
Miriad manager